一、前言
对于之前有写到的Dijkstra算法,我们发现他只能用来计算边的权值为正的情况,这其实也就是为什么我们需要开一个st数组,对于一个已经被更新过的点来说,他一旦用于更新其他点的时候,我们就不需要再考虑再利用这个点再次更新其他的点。
但是呢,如果点之间的边是负值的时候,就必须去遍历一下所有的边,因为存在负值的时候,负数加正数是会把距离缩短的,所以呢就可以利用遍历所有边的办法去更新点到原点的距离。这就需要用到后续要说的spfa算法,那么在讲这个算法之前,需要了解bellman-ford算法,会先利用这个算法进行一个引入。
本章题大多来源于ACwing,欢迎大家来这个平台一起学习算法!!
二、题目汇总
①bellman-ford(ACwing.853)
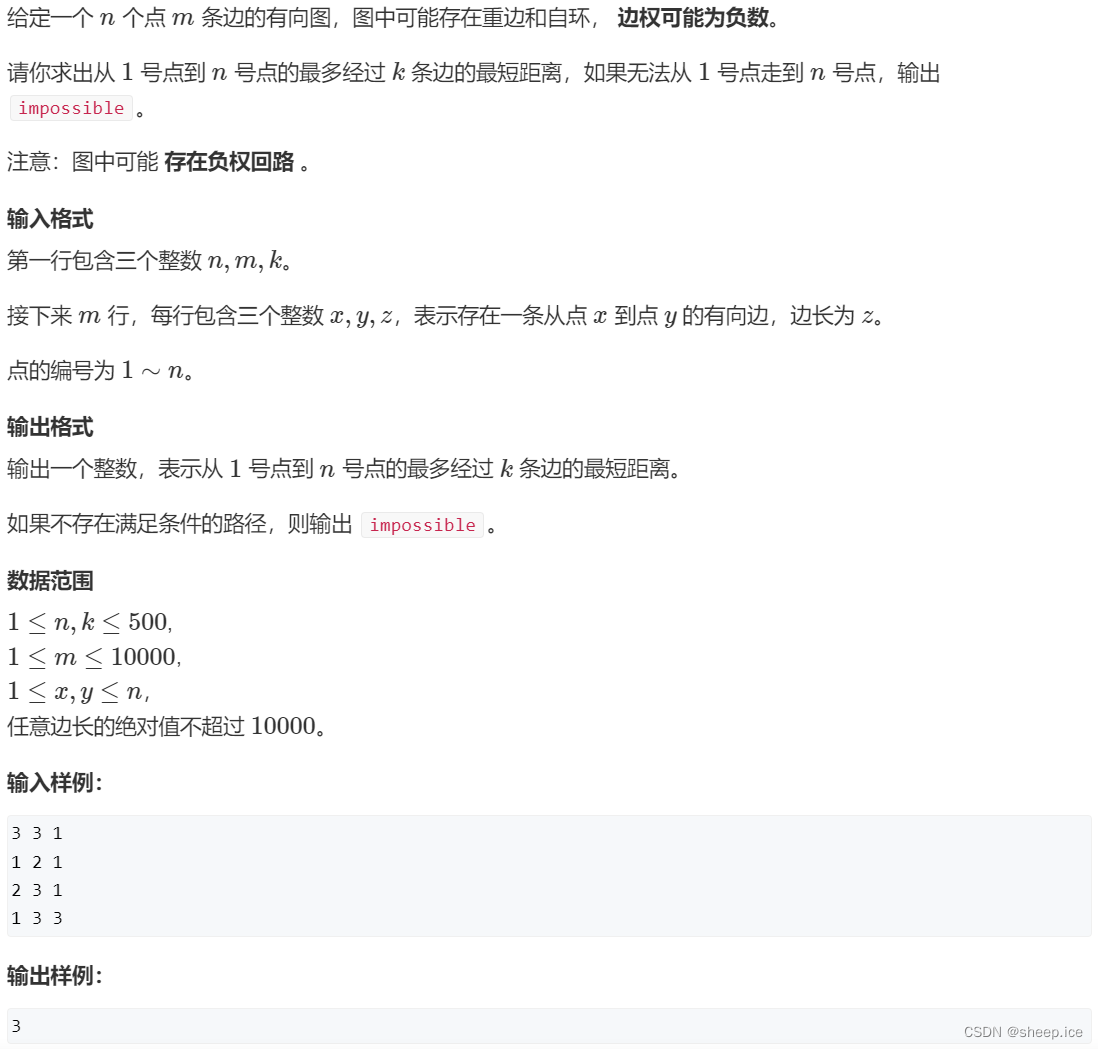
相关分析
时间复杂度: $O(mn)$
适用场景: 这个算法可以看到,时间复杂度比较高,所以mn的值要落在$1e7-1e8$之间才能满足不超时,另外,由于这个算法,是从原点出发,外层循环多少次,内层就需要更新多少次边。这个实际含义就是,外层循环多少次,就代表:从原点出发了多少条边,所以能够计算,走多少条边到终点的一个最短距离,注意这个最短距离并不一定是整个图看上去的最短,而是满足了走k条边的最短!
思路: 如果题目规定走k条边,那么按照上述分析,外层循环k次代表走k条边的更新情况,内部循环,更新每一条边,一旦能够更新就更新,不能更新的话,距离保证不变。这里注意由于内层循环更新的是所有的边,所以是有可能发生应该只再原本的基础上衍生1条边,但是衍生出去了2条边。所以需要一个回溯的数组,保存一下上一次更新好的dist数组。而这个串联反应可以举个例子,如下:

假设这个图,如果我们的k只给1的话,那么从1->3的距离最短应该为3,而不是1+1=2。假设我们在更新的时候,还是像之前dijkstra的更新方式,利用dist数组更新的话,那么在仅有的一次循环里面,1->2这条边的距离首先会被更新为1,那么在2->3这条边就会按照dist[2] = 1的这个数组更新dist[3],让dist[3]变成2,那么就和我们最终得到的答案3就是不同的。
完整AC代码
#include <iostream>
#include <cstring>
#include <algorithm>
using namespace std;
const int N = 505, M = 10050;
//因为要遍历所有边,所以结构体存图
struct Edge {
int a, b, c;
}edges[M];
int dist[N], n, m, k;
//设置一个回溯的数组
int backup[N];
void bellman_ford() {
dist[1] = 0;
for(int i = 1; i <= k; i ++ ) {
//先进行一个备份操作
memcpy(backup, dist, sizeof dist);
for(int i = 1; i <= m; i ++ ) {
auto t = edges[i];
//就是这个地方,如果写成
//dist[t.b] > dist[t.a] + t.c的话
//就会有可能出现串联反应
if(dist[t.b] > backup[t.a] + t.c) {
dist[t.b] = backup[t.a] + t.c;
}
}
}
}
int main() {
cin >> n >> m >> k;
memset(dist, 0x3f, sizeof dist);
for(int i = 1; i <= m; i ++ ) {
int a, b, c;
cin >> a >> b >> c;
//代表a到b有一条权值为c的边
edges[i] = {a, b, c};
}
bellman_ford();
if(dist[n] > 0x3f3f3f3f / 2) cout << "impossible" << endl;
else cout << dist[n] << endl;
}②spfa模板(ACwing.851)
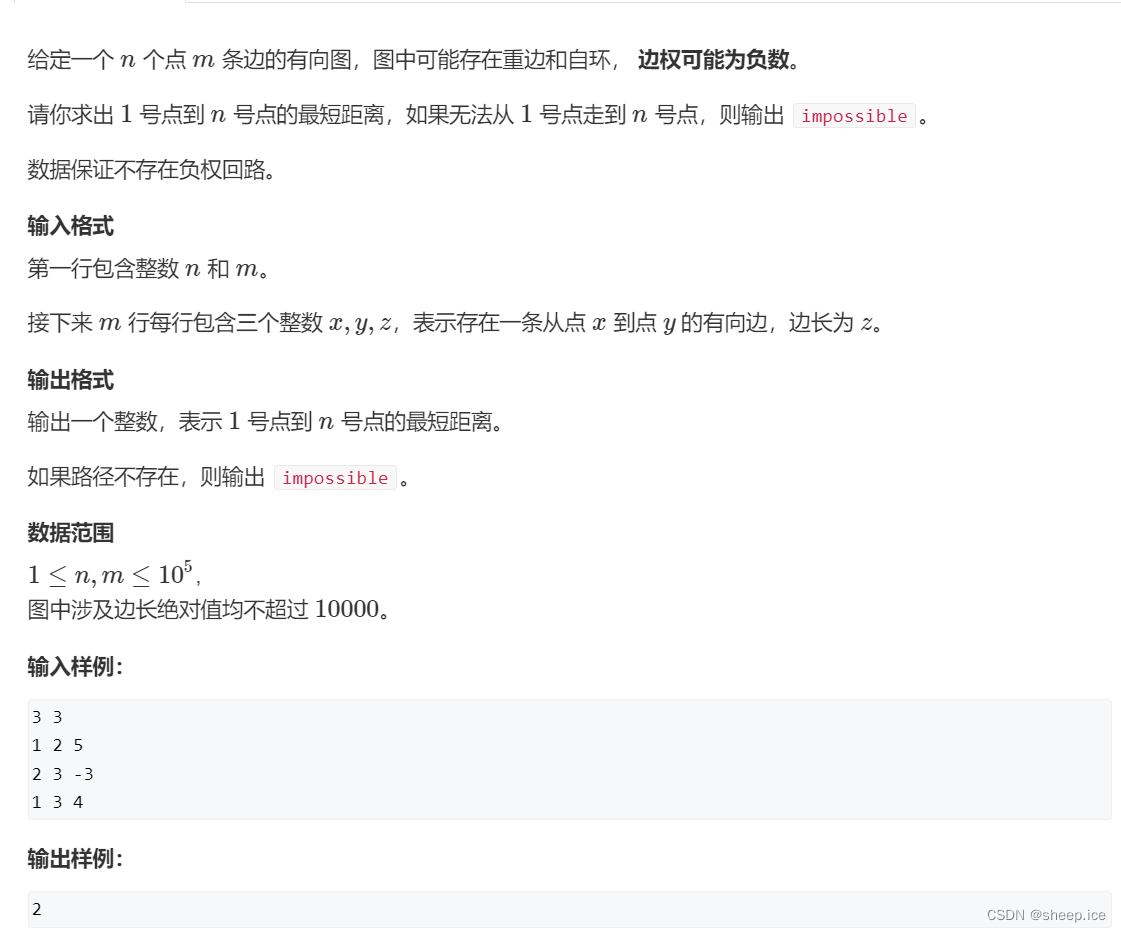
相关分析
时间复杂度: $O(m)$
适用场景: 其实spfa这个算法以他比较优越的时间复杂度,其实用在很多题目都可以,且不仅能够求带负权的最短路,在一定程度上也可以解决dijkstra的题目。并且这个算法,可以判定一个图里面是否有负环
思路: 这里的思路其实也是从上一个bellman-ford算法延申过来的。我们可以看到,上一个算法的好处就是可以知道有边限制的最短路,但是其实如果没有边的限制的话,第一个算法其实在内层循环遍历边的时候,会有很多操作本身更新不了一个点到原点的距离,但是还是进行了一个尝试更新的操作。那么spfa的话其实就是可以排除这些没有实际价值的更新操作,也就是说在$dist[j] = dist[t] + w[i] $的那一步,只有一个点能够达到这一步操作了,让这个点进入队列之中,才有机会更新其他的边,如果某个点本身压根无法更新其他边,那也就没有必要让他到队列中再去更新其他边
完整AC代码
#include <iostream>
#include <cstring>
#include <algorithm>
#include <queue>
using namespace std;
const int N = 1e5 + 5;
bool st[N];
int dist[N], n, m;
int h[N], w[N], e[N], ne[N], idx;
queue<int> q;
void add(int a, int b, int c) {
e[idx] = b, w[idx] = c, ne[idx] = h[a], h[a] = idx ++;
}
void spfa() {
q.push(1);
dist[1] = 0;
st[1] = true;
//利用类似宽搜的方法进行优化
while(q.size()) {
auto t = q.front();
q.pop();
//注意用过的点,有可能在后续更新的时候会继续用
st[t] = false;
for(int i = h[t]; i != -1; i = ne[i]) {
int j = e[i];
if(dist[j] > dist[t] + w[i]) {
dist[j] = dist[t] + w[i];
if(!st[j]) {
q.push(j);
st[j] = true;
}
}
}
}
}
int main() {
memset(h, -1, sizeof h);
memset(st, 0, sizeof st);
memset(dist, 0x3f, sizeof dist);
cin >> n >> m;
for(int i = 1; i <= m; i ++ ) {
int a, b, c;
cin >> a >> b >> c;
add(a, b, c);
}
spfa();
if(dist[n] > 0x3f3f3f3f / 2) cout << "impossible" << endl;
else cout << dist[n] << endl;
return 0;
}代码相关问题
这里的话有一个问题,就是为什么一个已经被使用来更新其他点的点,从对头取出来的那一刻,他的st数组要被更新成为没有使用过,这里举一个例子,例子图如下:
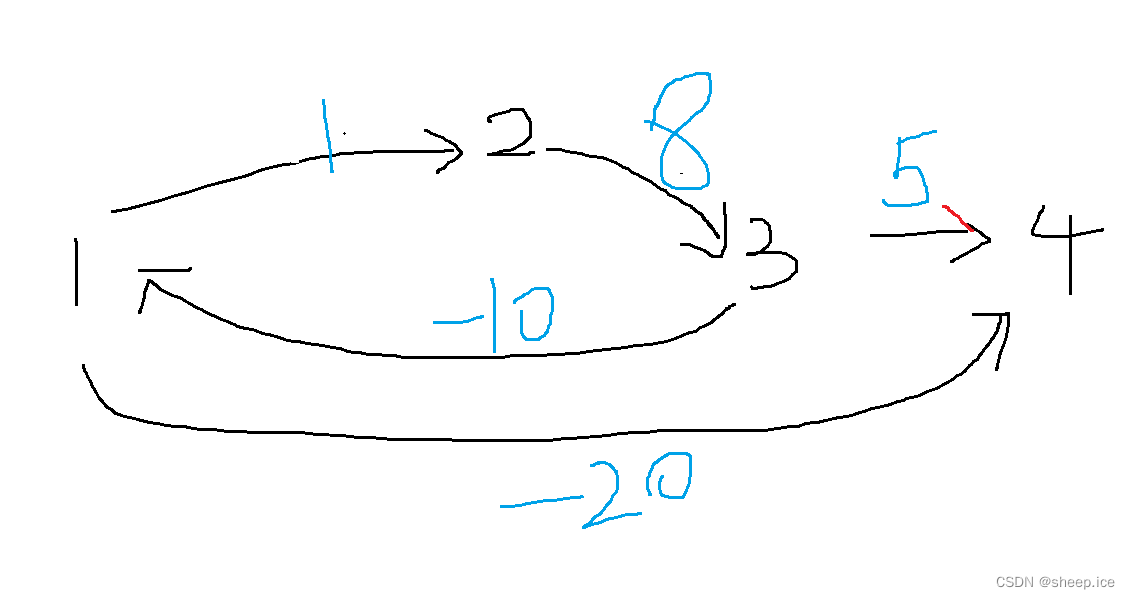
我们可以看到这个图,假设,我们在用1这个点第一次更新好1->2和1->4的距离后,不让他的st数组变为false的话,那么当3这个点用来更新1的时候,很显然从1->2->3->1一回会让整个路径变小,而我们虽然更新了一下3->1的距离,但是并没有在后面让1入队的话,那么1这个点就不会继续更新4这个点,当然这个例子有些问题,因为,我们可以一直让上方的环不断的走,让最后的1到4的路径距离不断的减少,所以希望读者有更好的例子可以举例一下。
当然,这个题,如果不专门用st代表是否访问,直接更新然后不断放点那其实就等同于bellman-ford算法了,所以还是建议这个地方能够继续好好理解一下。然后也正因为这样,spfa算法可以去判定一下是否有负环,或者是否有一个环可以让某一个路径的距离一直减小。
③spfa判断负环(ACwing. 852)
负环的定义就是一个环上边的权值全部为负数,刚开始我还一直这么认为的,其实负环应该是一个环上所有数加起来的权值和是为负数叫做负环,因此根据上面的一个分析,其实判断负环就很容易了,就看循环是不是一直跑不出来,因为不能死循环,所以我们要利用一个cnt数组,判断一下某个点走了多少次,根据抽屉原理,一旦走的次数比n大的时候,那么一定存在负环。

完整AC代码
#include <iostream>
#include <cstring>
#include <algorithm>
#include <queue>
using namespace std;
const int N = 100050, INF = 1e9 + 10;
int n, m, idx;
int h[N], e[N], ne[N], w[N];
int dist[N], cnt[N];
bool st[N];
void add(int a, int b, int c) {
e[idx] = b, ne[idx] = h[a], w[idx] = c, h[a] = idx ++ ;
}
bool spfa() {
queue<int> q;
for(int i = 1; i <= n; i ++ ) {
q.push(i);
st[i] = true;
}
while(q.size()) {
int t = q.front();
q.pop();
st[t] = false;
for(int i = h[t]; i != -1; i = ne[i] ) {
int j = e[i];
if(dist[j] > dist[t] + w[i]) {
dist[j] = dist[t] + w[i];
cnt[j] = cnt[t] + 1;
if(cnt[j] >= n) return true;
if(!st[j]) {
st[j] = true;
q.push(j);
}
}
}
}
return false;
}
int main() {
cin >> n >> m;
memset(h, -1, sizeof h);
for(int i = 0; i < m; i ++ ) {
int a, b, c;
cin >> a >> b >> c;
add(a, b, c);
}
if(spfa()) cout << "Yes" << endl;
else cout << "No" << endl;
return 0;
}代码问题
为什么dist数组不用初始化为正无穷?
其实就是,负环必须走的那个路径是有负数产生的,且由于一个环必须满足权值为负,那么我们其实可以偷懒一下,让每次开始更新dist出现在,我们搜索的时候,第一次搜到的负数开始,然后在更新dist,如果有负环,那么这个dist是会不断减少的。这个等价于什么呢,我们可以发现,之前的题目都是从1这个点出发开始的,而负环不一定存在1这个点连接的路径上,所以其实在刚开始,队列就应该把所有点放进去,然后所有点去找负环,那也就是说从这个角度看,所有点距离本身的距离为0,那么初始化为0就是正确的!



